
| �ԓ��V | ||
| EQ5 GOTO�@�i�X�J�C�E�H�b�`���[) |
| ���������ԓ��V |
| �Q�O�P�W�D�P�P�D�Q�P�@�[���i�������|�[�g�j | |
.jpg) |
|
| ��� | |
| EQ5�@GOTO�ԓ��V���������܂����B�����قǑ傫�Ȕ��A1�ő����Ă��܂����B | |
| EM200�@TEMMA2�@Jr���̏Ⴕ�A�����������o���Ȃ��Ȃ�܂����B�C�����悤���v���㗝�X�ɘA�������̂ł����A | |
| �[���͂P�`�Q�����A�C����̓��[�J�[�ɑ���Ȃ���Ε�����Ȃ��Ƃ̎��ŘA�����r�₦�܂����B | |
| EM200�̏C���͒��߁A�V�����̂����E�E�ƌ����̌��ʁAEQ�T�@GOTO�ƂȂ�܂����B | |
| EM200�͏d���`���C���ɂ͑�ςł��BEM11�ł́A���ď������B���ڏd�ʂ��W�D�TKg�Ƃ��܂������Ȃ��B | |
| �����̌��ʁA�����ŁA�����������o���ē��ڏd�ʂ�EM11��EM200�̊Ԓ��x�̕��ƌ������� | |
| EQ5�@GOTO�@�ƂȂ�܂����B���ڏd�ʂ́A�X�D�PKg�ł��B | |
.jpg) |
|
| ��� | |
| ����̏d�ʂ́A�Q�WKg�ł��B | |
| �`���b�g�v���Ă����̂��d���A��Z�ł����B�ԓ��V�́A�T�D�WKg�A�o�����X�E�G�C�g�́A�T�D�PKg���Q�B | |
| �\�z�O�ɏd�������̂��O�r�ł��B�T�D�WKg����܂��B | |
.jpg) |
|
| ��� | |
| ������J���ƁA�܂����č���ł��B��d���ł��B�����Ă��̏����ł��B�A | |
| �������J������ƃG�A�L���b�v�A�r�j�[���܂ɕ���ꂽ�@�ނ��p�������܂��B | |
| ����͌��d�ł����������Ă��܂��B | |
.jpg) |
|
| ���e�� | |
| �O�r�́A�����X�e�����X���ł��B�v�������d���������肵���r�ł��B | |
.jpg) |
|
| ���e�� | |
| �o�����X�E�G�C�g�́A�T�D�PKg���Q�ł��B�E�G�C�g�̌��a�́A�Q�O�����Ńr�N�Z���K�i�ł��B | |
.jpg) |
|
| ���e�� | |
| �ԓ��V�́AEM11���y���T�D�WKg�ł��B | |
.jpg) |
|
| ���e�� | |
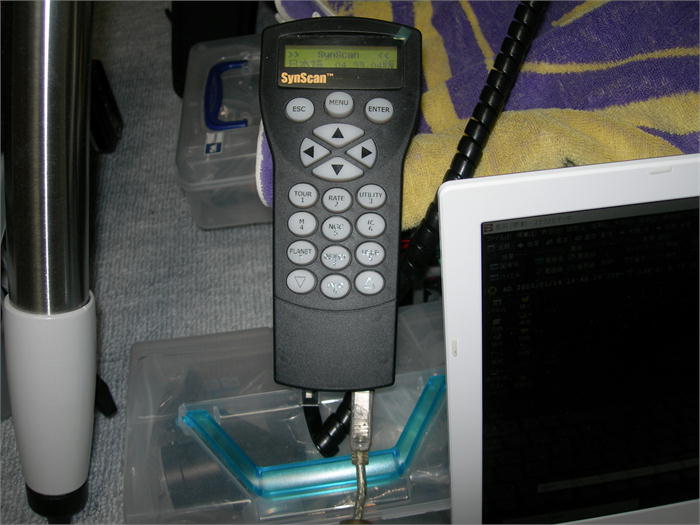
| SynScan��GOTO���i�ꎮ�ł��B�p�\�R���ɐڑ�����RS�[�Q�R�QC�P�[�u���͕t�����Ă��܂����B | |
| ����ɂ��ƕʓr�A�w���̐����ł��B����́A�K�b�J���ł��B | |
| �ǁX�A�p�\�R���ɐڑ����X�e���i�r�Q�[�^�Ŏ����������ł���悤�ɂ������v���܂��B | |
| |
|
 |
|
| �Q�O�Q�O�D1�D�P�S�@�m�F | |
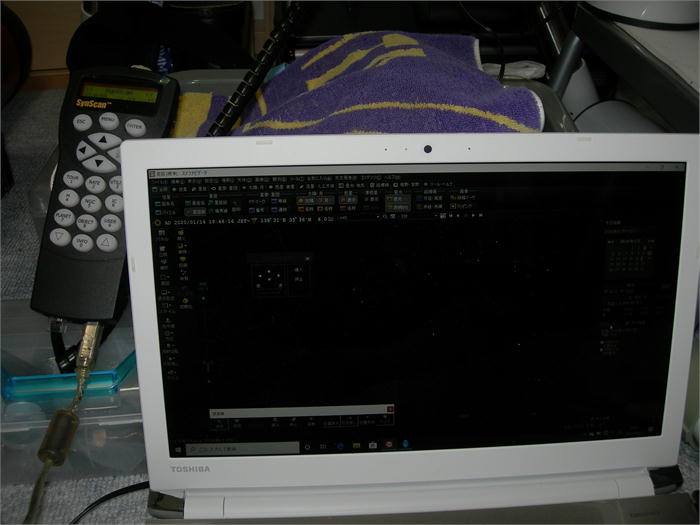
| �����Ԏ��Ԃ��o�߂��܂������A�w����̃V���~�b�g����Ƀn���h�R���g���[����PC�ڑ��� | |
| ���Ė₢���킹�����܂����B���̃^�C�v�̃n���h�R���g���[���́AUSB�ڑ��̂��̂� | |
| RS-232C�̃P�[�u���͕s�v�ɂĕt���͂��ĂȂ��Ƃ̎��ł��B | |
| USB�P�[�u���Ńp�\�R���ɐڑ�����A�X�e���i�r�Q�[�^�Ő���ł��A�������� | |
| ���\�ȃn���h�R���g���[���Ƃ̂��Ƃł��B | |
.jpg) |
|
| �g�ݏグ | |
| �g�ݏグ�Ăr�c�P�P�T�r�����𓋍ڂ��Ă݂܂����BEM11���V�b�J�����Ă������Ɍ����܂��B | |
| ����ŁA�ˑ�E�ԓ��V�́A�X�D�V���~�i�ō��j���x�ł��B�^�J�n�V��EM11�@TEMMA�Q�@Jr�̂P�^�R�ȉ��̉��i�ł��B | |
| �Ɏ��̃L���b�v�́A�K�p�K�p�ŗ��Ƃ��ĂȂ��������ł��B | |
| �Ɏ����킹�̔����l�W�́A�����d�߂ł��B���Ă�GPD�ԓ��V�Ɠ����l�ł��B | |
.jpg) |
|
| ���ϖ]�Ə��������� | |
| �Ɏ����킹�́A�Ɏ��]�����ɖ�����Ɩ����Ȃ������d���ŏƂ炳�Ȃ��ƃ��`�N���� | |
| ���������킹���Ȃ��ƌ������̂ł����B��Z�ł����B | |
| ���Ƃ������d���ŏƂ炵�Ɏ����킹�͊����B�o���Ȃ����͂���܂���B�����Ή��Ƃ��Ȃ�ł��傤�B | |
| ���悢�掩�������B���߂ĂȂ̂łQ�A���C�����g�ŃA���C�����g�����āA���������B | |
| �Ȃ��Ȃ��ǂ����x�œ�������܂��B�d�l�Q�O�O�A�d�l�P�P�@�s�d�l�l�`�Q�i���̎����������ǂ����x�ł̓����ł��B | |
| �������A�k�ɐ��Ƒ��̐��Q�̓����ł��B�s�d�l�l�`�̏ꍇ�́A�k�ɐ��ƂP�̐��̓��������ł̓����ł��B | |
| �R�A���C�����g���Ƃ����Ɛ��x�ǂ����������Ǝv���Ɗ����ł��B | |
| �������x�́A�W�O�O�{���B���Ɍy�₩�ł��B�쓮���́A�Â��ł��B���x�������� | |
| EM200��EM11����傫�����Ȃƌ����ʂł��B | |
| EM11�@TEMMA2J���̂P�QV�łP�Q�O�{���A�Q�SV�ł��Q�T�O�{���Ƃ� | |
| ��ׂ��̂ɂȂ�Ȃ������ł��B�ŐV��EM11�ł��A�P�T�O�{���B | |
| �ǔ��̎��̉��́AEM200�AEM11���傫�߂ł����C�ɂȂ鉹�ł͂���܂����B | |
| ���������ɂ����ẮAEQ�T�@GOTO�̕����D��ƌ������z�ł��B | |
| �ǂ��āA���_�����m�[�^�b�`�K�C�h�ŎB�e���ǔ����x���m�F�������v���܂��B | |
| �܂��A�I�[�g�K�C�h������Ηǂ������̎��ł����E�E | |
| SynScan��Ver.�́AVer�D04.39.04�ł����B���{��Ή��A�ԓ��V�E�o�ܑ䗼�Ή��̕��ł����B | |
| �����A���{��̕\���Ƃ��܂����B���j���[�݂̂Ȃ炸�A�������鐯�̖��̂� | |
| ���{��\���ƂȂ�܂����B�㗝�X�@�V���~�b�g����쐬�̓��{��̎���ɐݒ���@�͋L�ڂ���Ă��܂��B | |
| ������@�́A�ȒP�Œ����ŕ�����܂��BTHC�Ƃ́A��Ⴂ�ł��B | |
| �Q�P���ɔ[�����{���Q�S���B�R���g�p���������ŁA�X�J�C�E�I�b�`���[�́A�����Ɗ������܂����B | |
| EM200�Ɠ����̑傫����EQ�UR���~�����Ȃ��Ă��܂����B | |
| �Q�O�P�W�D�P�P�D�Q�U�@����̕� | |
| ���A���^�C���蓮���� | |
| �C�ӂ̈ʒu�̜a�����蓮�œ����������̂����ǂǂ�����̂��낤�B | |
| �C�ӂ̐ԈܐԌo�����Ȃ���蓮�œ����ł��鎖��������܂����B | |
| �@�ݒ�iMENU�j���烆�[�e�B���e�B�t�@���N�V�����^�ʒu�\���Ŗ]�����̌��݂̈ʒu�� | |
| �\������܂��B�ԈܐԌo�\��������܂��B | |
| ���A���^�C���̍��W�\�����Q�Ƃ��A����̍��W�̈ʒu���蓮�������ł��܂��B | |
| �ƌ������́A�X�e���i�r�Q�[�^�[��PC�ڑ��͕s�v�����E�E�E�ł��B | |
| �X�e���i�r�Q�[�^�[�̐ԈܐԌo�����T���āA���A���^�C����������Ηǂ���ł�����B | |
| �E�B���^�l���a���i�S�U�o�j�������������邭�Ȃ��������Ă݂����Ǝv���܂��B | |
| �Q�O�P�W�D�P�P�D�Q�V�@���� | |
| �Ɏ��]�������x�������o�[�̉��P | |
| ���o�[���n���h���܂݂Ɍ������܂����B | |
| ���L�ʐ^�̃l�W�����́A�k���T�T�����A�쑤�U�O�����ł��B | |
| �l�W�́A�Ƃ肠�����S�l�W�ł����A�X�e�����X�l�W�𒍕����܂����B | |
| ���������̂́AM�W�~�U�O�̘Z�p�{���g�i�Q�{�j�ł��B | |
| �{���̒����ɂ������ꍇ�́A�l�W�i�j�����@�k���̓n���h����������邽�߂T�T�����B | |
| �쑤�W�O�����ƂȂ�܂��B�k�܂R�T�x�t�߂Ŏg�p�̏ꍇ�A�����U�O�������x���ǂ��ł��B | |
| �n���h���́A�|���^�U�o�ܑ�Ŏg�p�̃`�F���W�m�u �l�W�ł��B�|���^�U�o�ܑ�@�������|�[�g�Q���B | |
| �k�ɐ��̓������y�ɂȂ�܂����B | |
.jpg) |
|
| �Q�O�P�W�D�P�P�D�R�O�@���B�e�ƃ��A���^�C���蓮���� | |
| ���B�e | |
| EQ5 GOTO �ԓ��V�Ŏn�߂Ă̐��_�B�e�����Ă݂܂����B�B�e�Ώۂ́AM42�ł��B | |
| �R�A���C�����g�Őݒ�B�V���E�X�Ńs���g�����킹�Ă����āAM42�����B�e�ł��B | |
| �U�O�b���x�ł́A�܂���������܂���B | |
.jpg) |
|
| M42�@�B�e�@�Q�O�P�W�D�P�P�D�R�O�@�Q�Q�F�S�U�@�I�o�U�O�b | |
| �����FED102SS�i�r�N�Z���j�@�J�����FEOS KISS Digital�@X | |
| ���A���^�C���蓮�����ɂ��a���B�e | |
| �E�B���^�l���a���i�S�U�o�j���A�B�e���Ă݂܂����B | |
| M42�B�e�̎��̃A���C�����g�Ń~�����B�~������́A���A���^�C���蓮������ | |
| �a���̈ʒu�i�Ԉ܁A�Ԍo�j���m�F���Ȃ��瓱���ł��B | |
| �����A�E�B���^�l���a���������ł��B�e�ł��܂����B�ڎ��ł́A�m�F�ł��܂���ł����B | |
| �p�\�R���s�v�œ����ł��܂����B | |
| �U�O�b���x�ł́A�܂���������Ă��܂���B | |
| EQ5�@GOTO�ɂ́A�����̂悤���������Ȃ��̂Ŝa���̋߂��̐��ŏꏊ��ǂ����� | |
| �����ł��܂���B���̕��A�R�A���C�����g�̎��ɜa���̋߂��̐��i���̎��́A�~���j | |
| �ŃA���C�����g���K�v�ł����B�����̐��ŃA���C�����g������ƃ~���������ł����A | |
| �E�B���^�l���a���́A��������ł����B | |
.jpg) |
|
| �E�B���^�l���a���i�S�U�o�j�@�B�e�@�Q�O�P�W�D�P�P�D�R�O�@�Q�Q�F�T�U�@�I�o�U�O�b | |
| �����FED102SS�i�r�N�Z���j�@�J�����FEOS KISS Digital�@X | |
| �Q�O�P�W�D�P�Q�D�P�V�@���A���^�C���蓮�����@�� | |
| ���A���^�C���蓮�����ɂ��a���B�e�@�E�B���^�l���a���i�S�U�o�j | |
| �Q�O�P�W�D�P�Q�D�T�@���| | |
.jpg) |
|
| �ϖ]���Ă���ƁA�o�����X�E�G�C�g�����Ɋ��藎���Ă��܂����B���̓s�x�A | |
| �o�����X�̎�荇�킹�����ł��B�ʓ|�ł���������܂���ł����B | |
| �����́A�E�G�C�g�̌��A���A�~�߃l�W�ɖ������t�����Ă��芊���Ă��܂����B | |
| ���ׂ̏�Ԃ���ł����B������܂ŃE�G�C�g�̌��A���A�~�߃l�W�悭��������ʁA | |
| ���藎���͖����Ȃ���P����܂����B | |
| �Q�O�P�W�D�P�Q�D�V�@���� | |
.jpg) |
|
| �Ɏ��]�������x�������o�[�̉��P�@�� | |
| ���x�i�p�x�j�����l�W���X�e�����X�l�W�Ɍ������܂����B | |
| M�W�~�U�O�̘Z�p�{���g�i�Q�{�j�ł��B�k�܂R�T�x�t�߂Ŏg�p�̏ꍇ�A�����U�O�������x���ǂ��ł��B | |
| �Q�O�P�X�D�R�D�P�@�g�p�d�� | |
.jpg) |
|
| AC�P�QV�d�� | |
| AC�d���́A�X�C�b�`���O�d�����g�p���Ă���܂��B | |
| ����́AEM200�AEM11�p�ɏ��������d���̗��p�ł��B | |
| �^���@�q�v�r�P�O�O�a�|�P�Q�@�i�s�c�j�@�����_�j | |
| ���́@85�`265VAC�@�T�O�^�U�OHz�@�@ | |
| �o�́@�P�QVDC�@�W�D�TA | |
| �ڂ����́A��������������������B | |
| |
|
| �Q�O�P�X�D�R�D�P�Q�@���� | |
 |
|
| �Ɏ��]�������x�������o�[�̉��P�@�� | |
| �n���h���܂݂��N�����v���o�[�Ɍ������܂����B | |
| �k���̃n���h�����̂ɗ͂�v���A���ɂ͉��Ȃ����Ƃ�����܂����B | |
| �N�����v���o�[�ɂ��鎖�ɂ��͂�����A���������Ɋy�ɂȂ�܂����B | |
| �N�����v���o�[�@�^���FLEMS�|�W�|�T�O�|BK�i���[�J�[�FNBK) | |
| �Q�O�P�X�D�R�D�P�S�@�x�����_�������� | |
 |
|
| �x�����_�Ŏ��������Ƀ`�������W���Ă݂܂����B | |
| EM11�AEM200���Ǝ����������x�����_�ł͏o���܂���ł����B | |
| ���ʎ��Ŗk�����킹�A�����X�^�[�A���C�����g�ŋߏ�̐��i����̓A���^���X�j�� | |
| �������ݒ�BM6�AM7�AM�W�AM20�A�ؐ��A�y���Ǝ����������Ă݂܂����B | |
| �����A���������ł��B | |
| |
|
| �Q�O�P�X�D�R�D�P�T�@�x�����_�������� �ƎB�e | |
| �����AM20�AM8�AM7�AM6���B�e���Ă݂܂����B | |
| �B�e�摜�́A���������������������B | |
| |
|
| �Q�O�Q�O�D�P�D�P�S�@�p�\�R���ɂ�鎩������ | |
 |
|
| USB�ڑ���RS-232C�P�[�u���́A�s�v�Ƃ̎��ɂ�USB�P�[�u���Ńp�\�R���ɐڑ����܂����B | |
| USB�P�[�u���́ATy�����a�̃P�[�u���ł��B | |
| |
|
 |
|
| �m�[�g�p�\�R���ɐڑ����܂����B�d���n�m����� | |
| �@�r����Scan | |
| ���{��@�O�S�@�R�X�@�O�S�� | |
| �ƕ\������܂��B�n���h�R���g���[���́A���̂܂ܐG�ꂸ | |
| �p�\�R���𑀍삵�܂��B | |
 |
|
| �X�e���i�r�Q�[�^�Ł@�]�����R���g���[���@���@���[�J�Fsky�|��atcher �@�]�����FEQ�R�^�T�^�WGOTO | |
| ���@�ڑ��@�Ł@���䂪�\�ƂȂ莩���������ł��܂��B | |
| �p�\�R���ɐڑ����X�e���i�r�Q�[�^�Ŏ����������ł���悤�ɂȂ�܂����B |
�@